Introduction to the Project
This project was inspired by a conversation at the pub where the question, “What if a spider robot could also walk with a dog-like gait?”. With this train of thought, a student completed their bachelor’s with a Capstone project I supervised that brought this proposed device into existence. Said student did a great job and published a paper in which they were the first author [Morley 22]. While there were a few robots in existence at the time that suggested multi-gait systems (ex. [Hooks 21, Hashimoto 17]), the system in this project was designed to use simple legs with three actuators connected by rigid links to perform a wide range of gaits. The novelty of the presented solution was attributed to the simplistic leg structure, the quadrupedal nature of the system, and its capability to transition into various gait styles.
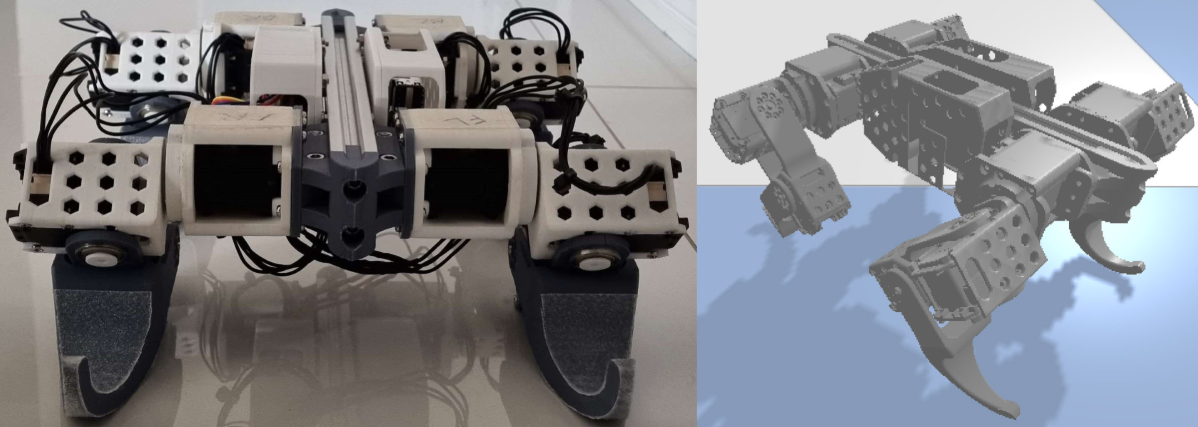
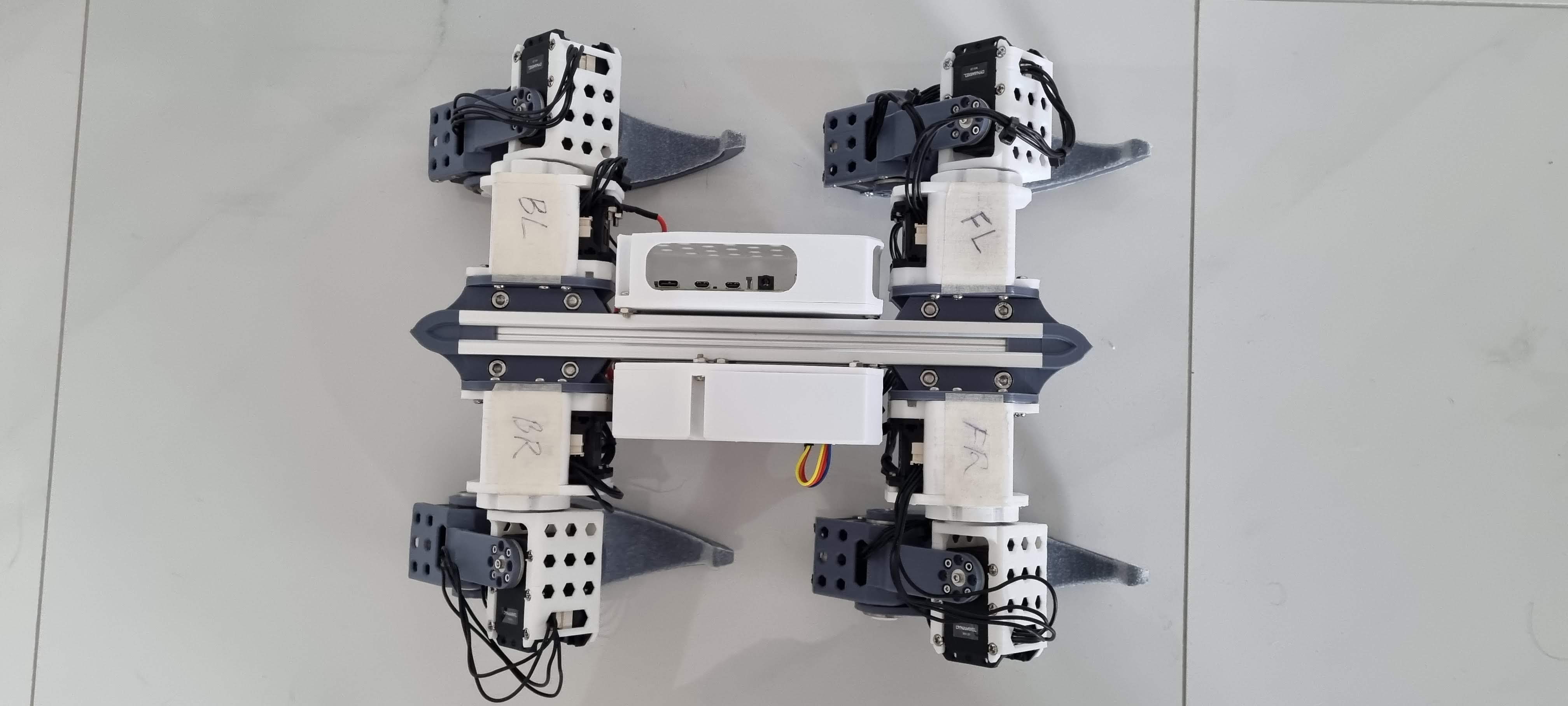
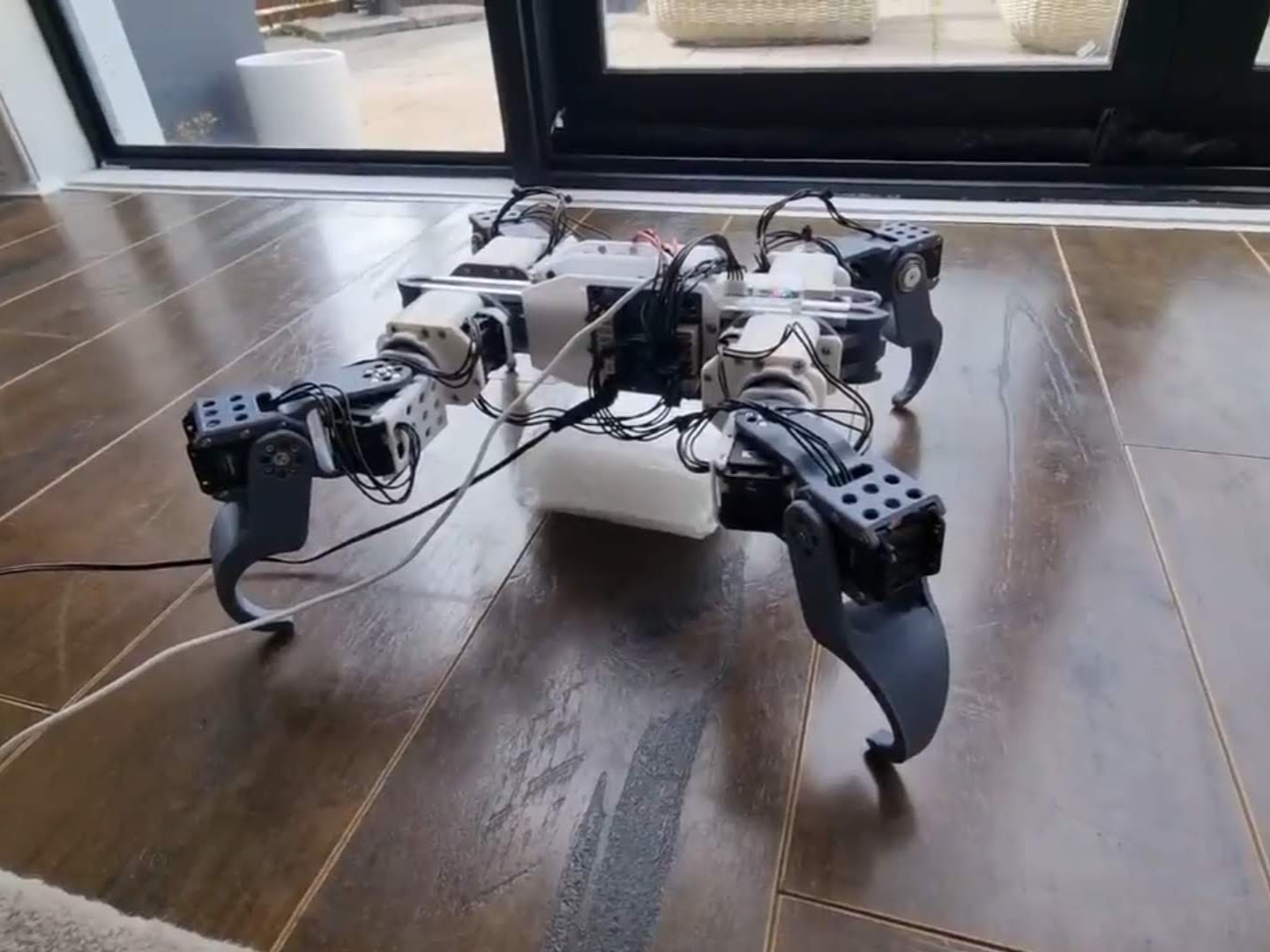
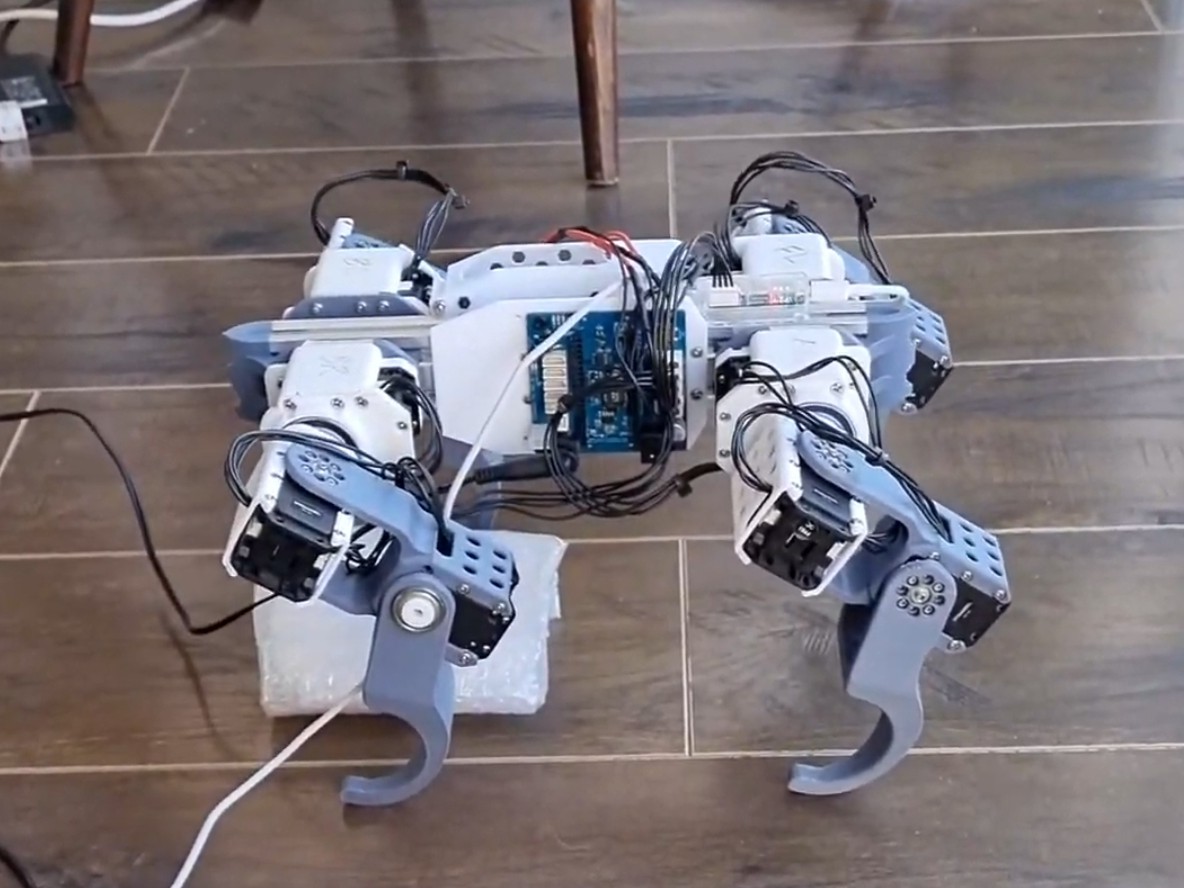
Simulation and Produced Prototype.
These factors led the student and me to spend a semester developing a preliminary prototype and simulated model, as shown in the images above. Broadly speaking, the purpose was to design and validate a proof of concept system that could demonstrate a series of gaits with wildly varying locomotion and trajectory motion characteristics. The long-term vision of this system was to develop a research platform in which reinforcement learning (RL) experiments could be conducted to evaluate algorithms and understand both how they converge to locomotion solutions when several possible options are feasible and whether the type of rewards/learning configurations impact the learned locomotion gaits.
My role in this project was in a supervisory capacity. The student involved did an excellent job with the design of the quadruped, fabrication, and paper authorship. My primary role was the project’s academic supervisor while providing technical support in the electronics and firmware domain. In addition, I also did the early-stage modelling of the quadruped system, defining the Denavit-Hartenberg parameters and embedding the calculations into Python to assist the student with the preliminary trajectory generation framework used for evaluation in the paper.
Defining the System
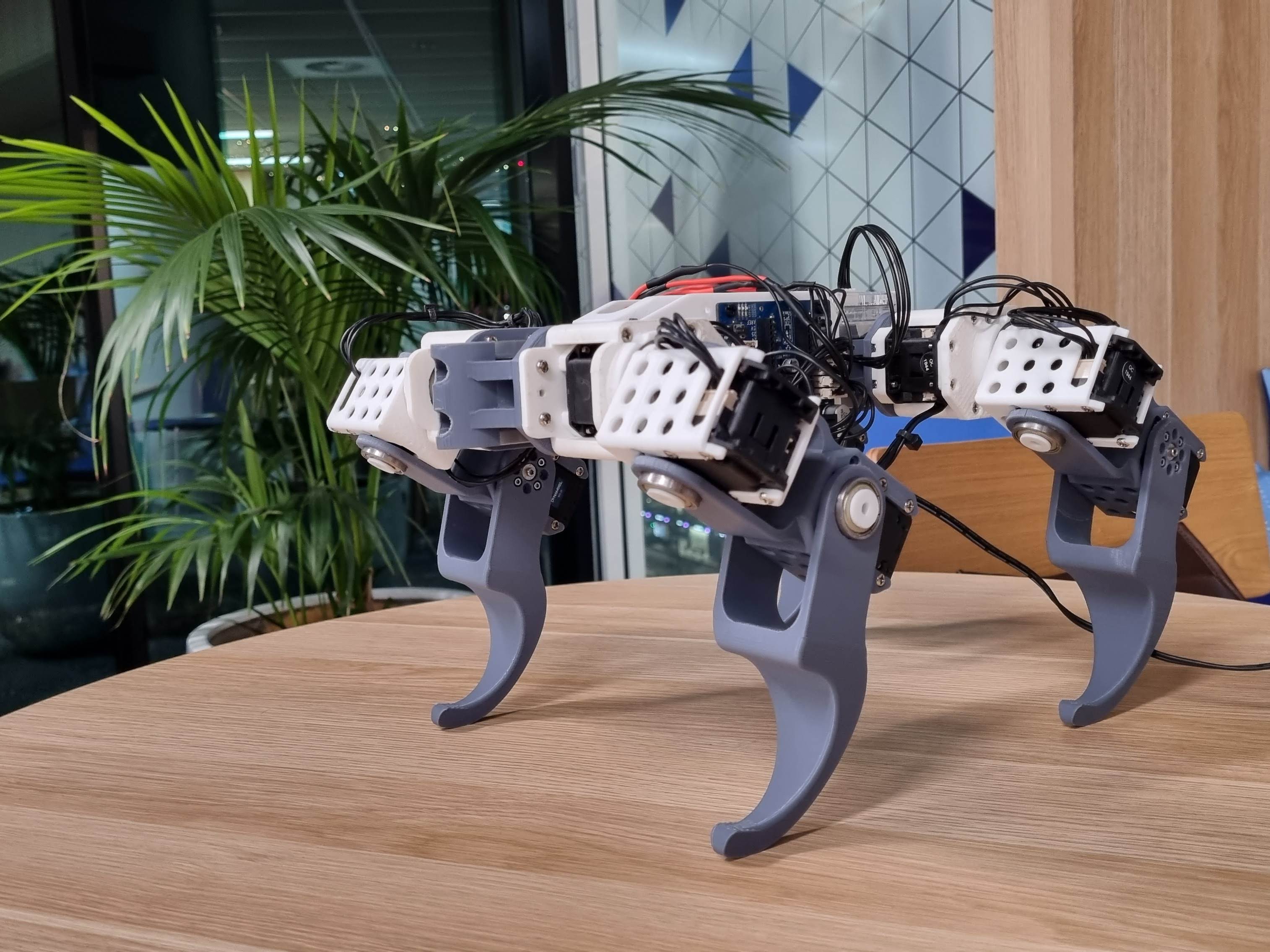
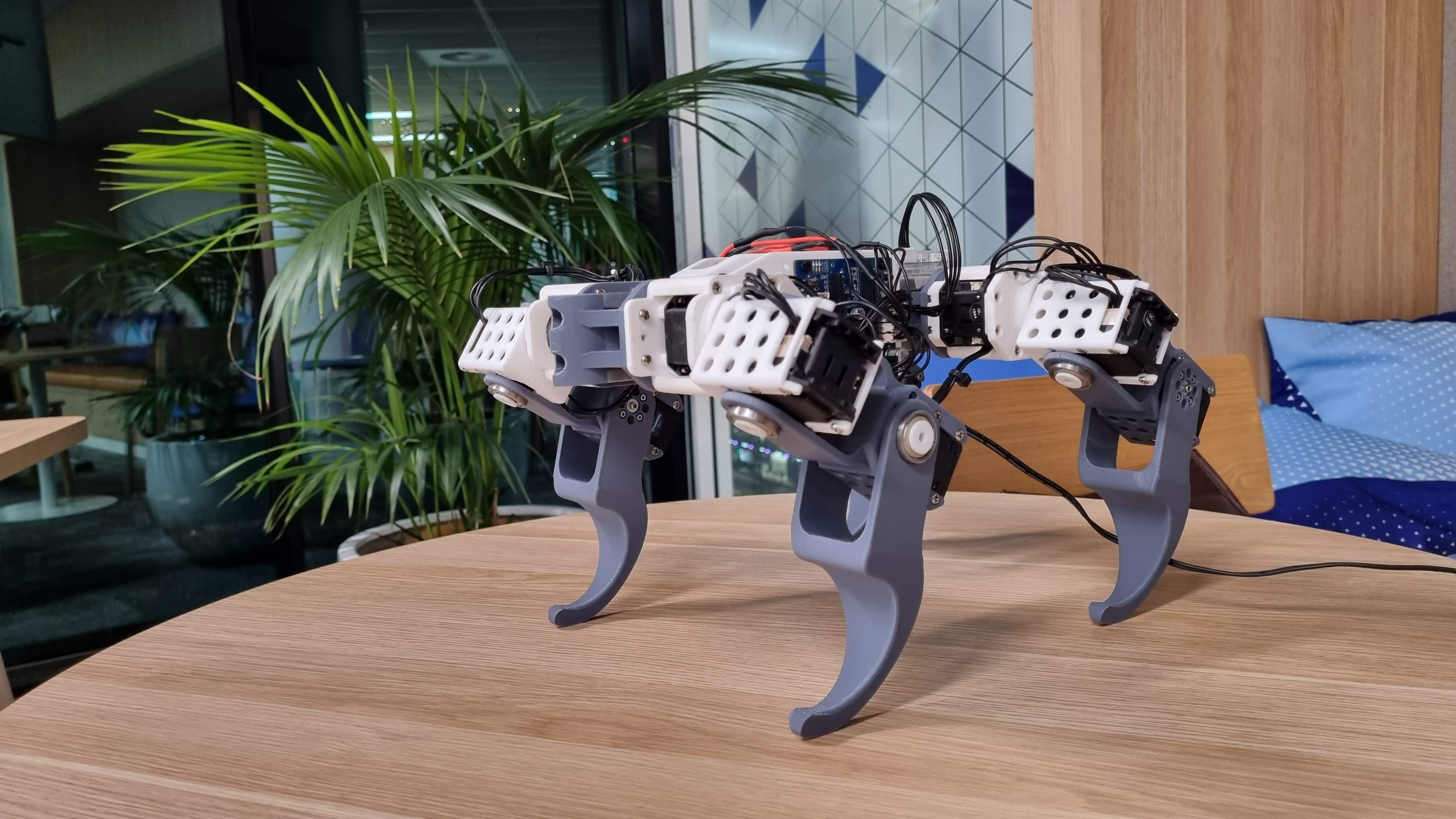
The Denavit-Hartenberg parameters define the mathematical representation of each leg of the system. Each leg can then be attached to the main chassis of the quadruped’s body. The chassis comprises a central aluminium extrusion, with each leg attached via FDM-printed parts. The student tried to reduce the system’s weight and size throughout the design process. After a few prototypes were produced and evaluated, we settled on the final design shown in the images in this article. We then confirmed our final prototype (shown in the mechanical drawings below). Next, a URDF model of the proposed robotic platform was produced for simulating the system and it’s various gaits.
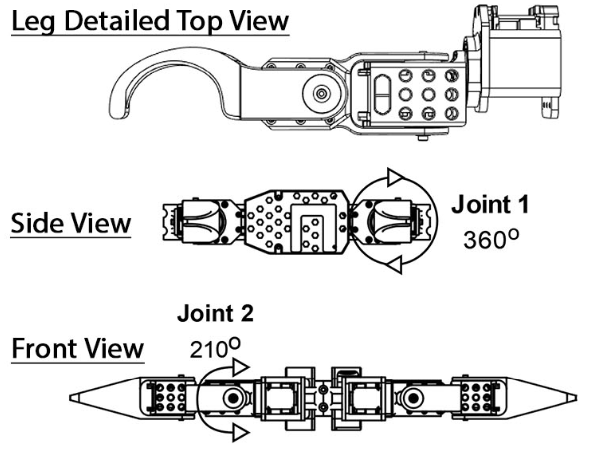
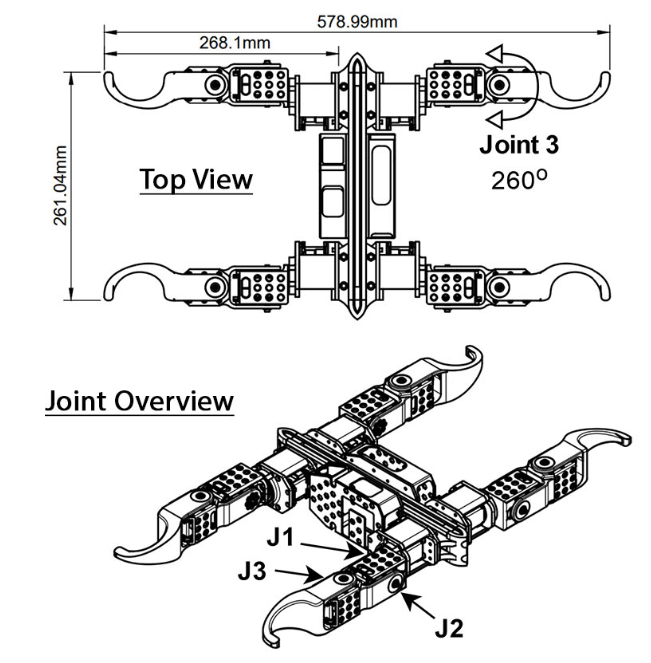
Mechanical Drawings of the SENCE Platform.
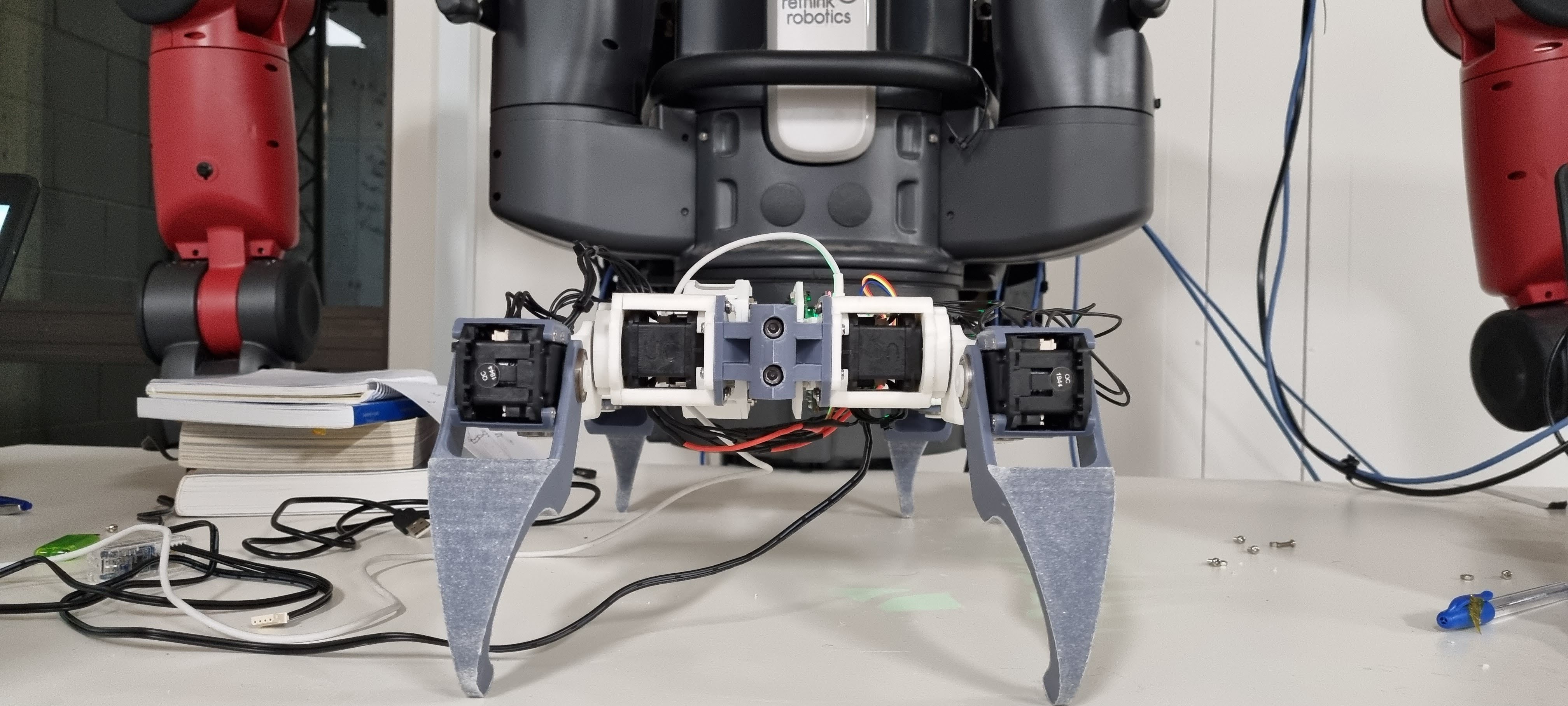
As a fun aside, we found that the final prototype could hang off a table due to the curved final link in the printed leg component, which was fun.
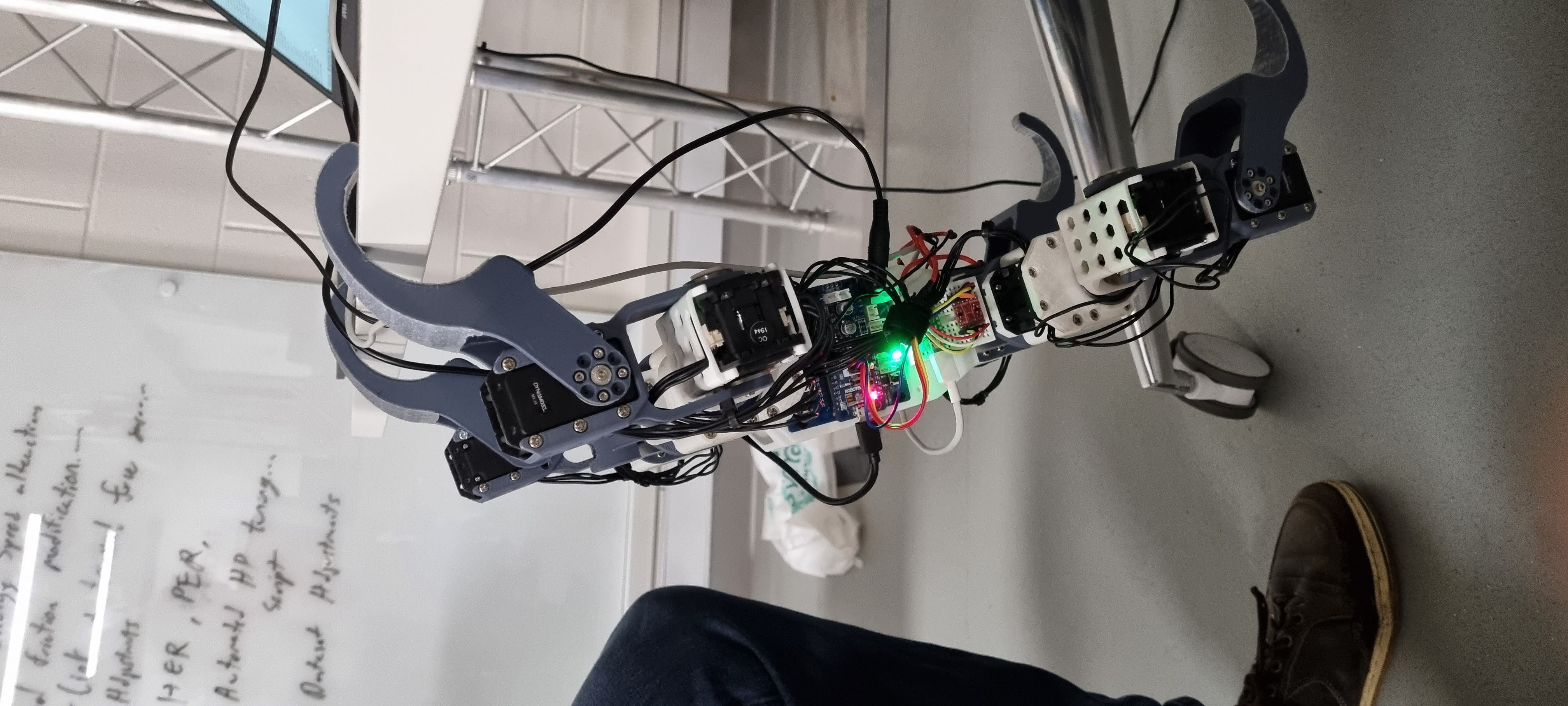
Just Hanging.
Bringing it to Life
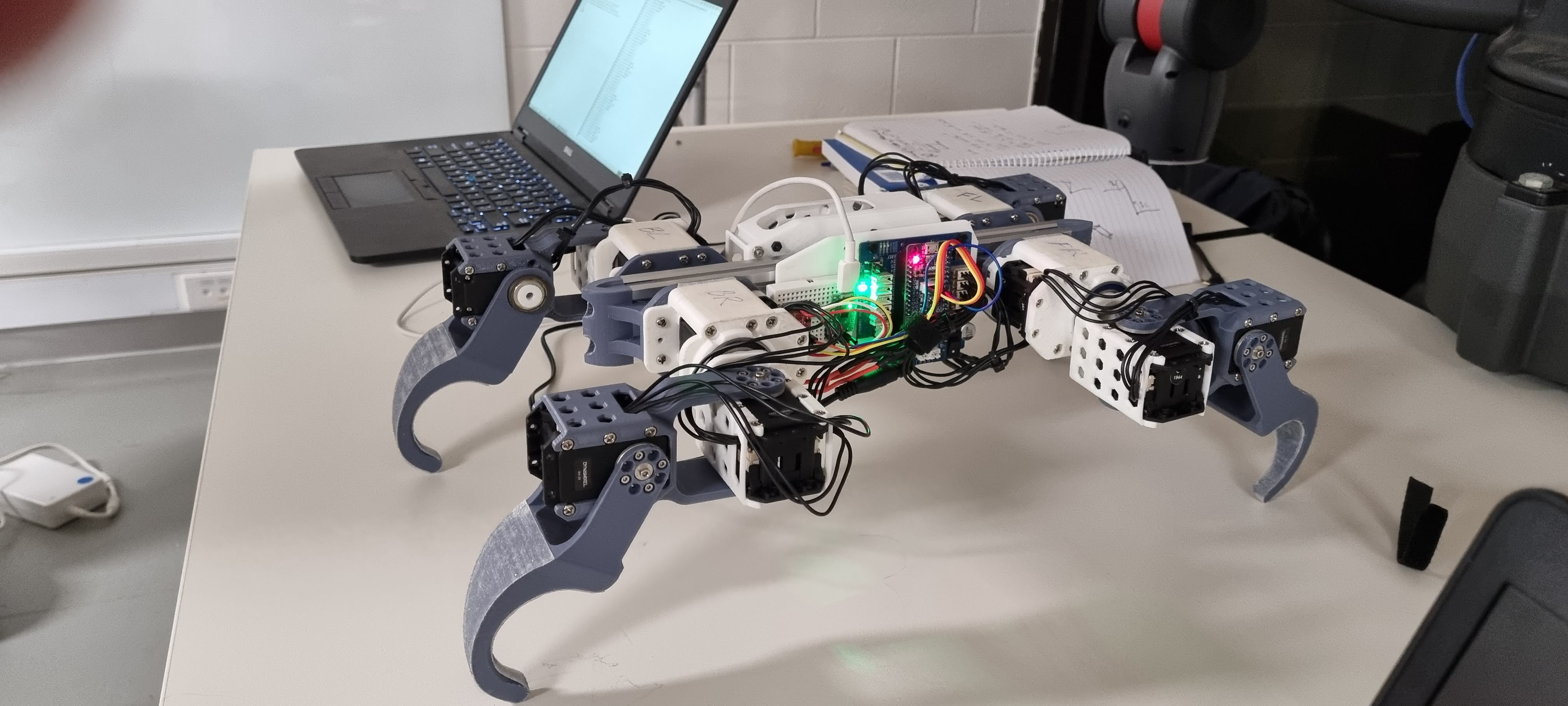
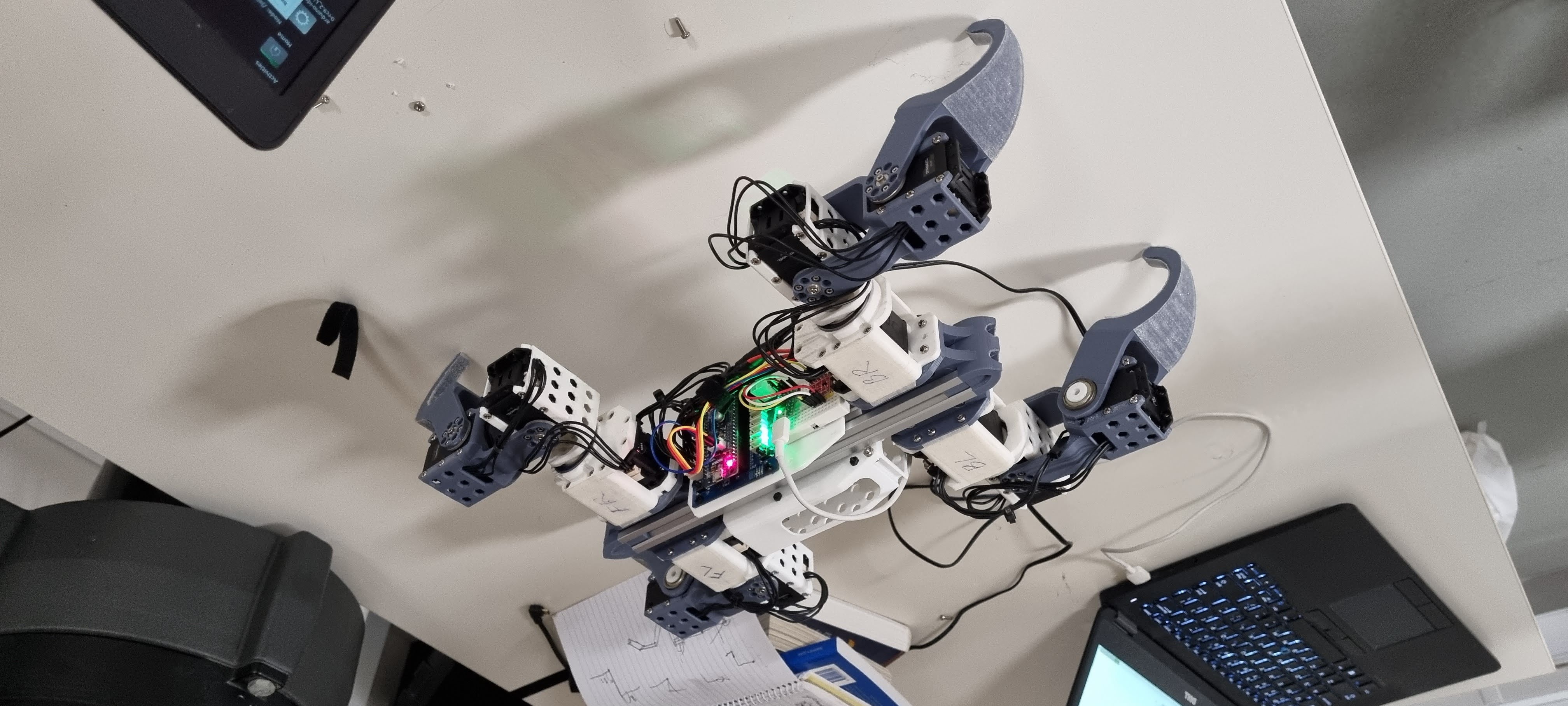
In terms of fabrication, the process could be completed with components from the local hardware store, a 3D printer and Dynamixel MX-28R actuators already present in the HCC robotics lab at the University of Canberra. With these components, the robot was put together relatively quickly. The actuators operated with in-built position velocity control mechanisms. They used the RS-485 protocol to communicate information with a host controller. Depending on the context, a Dynamixel U2D2 USB interface connected the actuators to a Raspberry Pi or a laptop. This setup allowed us to daisy-chain the actuators while robustly communicating with the host. Additionally, as part of the software libraries available for interfacing with these actuators, there was an option to bulk package the serialised data for all actuators, meaning commands and feedback could be rapidly transmitted throughout the system.
After writing the drivers to the actuators, they were integrated into the ROS stack so the hardware’s behaviour correctly mirrored motions and trajectories performed in the simulation with the URDF model. In addition, the ROS messaging configuration and driver setup allowed programs written by students in Python to execute walking sequences in both the simulation and the hardware. Having written the ROS stack and integrated the electronics, we moved towards a publication at the Australasian Robotics and Automation Association in 2022. The student I was supervising developed a series of unique gaits across the literature and then built a series of preprogrammed trajectories first executed in simulation. After tweaking and tuning the results in simulation, the locomotion sequences were deployed to the hardware, as shown in the videos at the bottom of this post. The paper outlined the literature on multi-modal locomotion for robotics, the design, mechanics, fabrication, unique gaits formulation, and the evaluation of these gaits performed on the hardware platform. For an undergraduate, getting a first authorship paper at ACRA is a considerable achievement I’m proud to have been a part of.
Exploring the Future Potential
While the preliminary demonstrations worked on the presented platform, several further avenues to refine this system could be explored. To start, actuators with only position and velocity control are not ideal for locomotion. While operating the system during the initial design and evaluation process, overheating and overloading errors in the actuators were occasionally encountered. Actuators with some form of compliance are more suited. In addition, some limitations were noted in the existing gaits; specifically, the dog-like gait could be slightly improved. An enhanced design or updated trajectory planning process could assist further investigations.
In addition, an expanding modelling process should be employed, including velocity kinematics, kinostatics, and dynamics. After modelling, a model-predictive control mechanism could significantly enhance future operations. However, these steps outlined in this section are aspects of robotics design that could be incorporated after the preliminary design and concept have been shown, which was the purpose of this project. Lastly, as mentioned in the introduction, the natural next step of this project is to employ reinforcement learning to explore how algorithms adapt to employing various gaits. Such a project could be interesting for adaptable locomotion systems deployed in the wild.
Below is a gallery of images showing the system, videos showing the different gaits, etc.
SENCE Image Gallery.
(click to view each image at full size)
Videos of the Various Gaits Explored.
References
[Hashimoto 17] Hashimoto, Kenji, et al. “WAREC-1—A four-limbed robot having high locomotion ability with versatility in locomotion styles.” 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR). IEEE, 2017.
[Hooks 21] Hooks, Joshua, et al. “Alphred: A multi-modal operations quadruped robot for package delivery applications.” IEEE Robotics and Automation Letters 5.4 (2020): 5409-5416.
[Morley 22] Morley, Dylan, David Hinwood, and Damith Herath. “Design of a Novel Multi-Gait Quadruped.” 2022 Australasian Conference on Robotics and Automation, ACRA 2022. Australasian Robotics and Automation Association, 2022.